
کنترل محدوده سرعت حرکت اتومبیل در جاده با استفاده از منطق فازی(قسمت دوم)
کنترل محدوده سرعت حرکت اتومبیل در جاده با استفاده از منطق فازی(قسمت اول)
کنترل محدوده سرعت حرکت اتومبیل در جاده با استفاده از منطق فازی(قسمت دوم)
متغيير ورودي”DDl” :
مجموعه هاي closer , constant , further بيان كننده تغييرات فاصله سمت چپ ماشين در آخرين لحظه مي باشند.
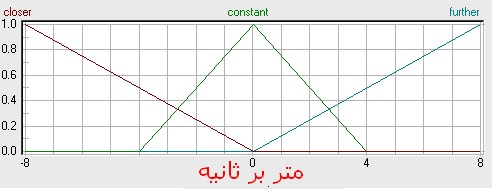
توابع عضويت براي DDl
متغيير ورودي”DDr” :
مجموعه هاي closer , constant , further بيان كننده تغييرات فاصله سمت راست ماشين در آخرين لحظه مي باشند.
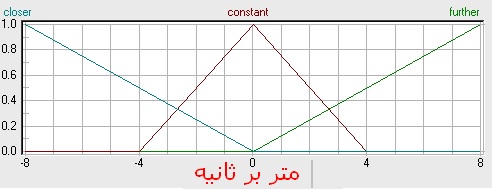
توابع عضويت براي DDr
متغيير ورودي”Dfdf” :
اختلاف بين فاصله هاي روبرو از راست و چپ براي تشخيص دادن ميزان پيچ جاده استفاده مي شود. هر چه اين اختلاف كمتر باشد پيچ انحناي بيشتري دارد و هر چه اين اختلاف بيشتر باشد
پيچ نرم تر مي باشد.
متغيير ورودي”Dfl” و”Dfr” :
فاصله از روبروي چپ براي راندن در يك منحني به سمت راست با طاويه فرمان مناسب استفاده مي شود. همچنين از فاصله از راست براي راندن در امتداد منحني سمت چپ با زاويه فرمان مناسب مي باشد.

توابع عضويت براي “Dfdf”

توابع عضويت براي “Dfl” و”Dfr”
متغيير ورودي”Dl” و “Dr” :
يك سنسور براي محاسبه فاصله ماشين از سمت چپ و فاصله ماشين از سمت راست جاده استفاده مي شود.
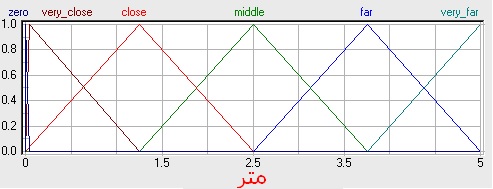
توابع عضويت براي “Dl” و “Dr”
متغيير ورودي”Steering” :
اين مغيير نشان دهنده زاوبه چرخ جلوي ماشين نسبت به محور آن مي باشد. زاويه در جهت مثبت فرمان به راست و زاويه در جهت منفي فرمان به چپ مي باشد.
محدوده تغييرات اين زاويه از -40 تا +40 مي باشد.

توابع عضويت براي “Steering”
متغيير ورودي”DSpeed” :
اين متغيير ورودي نشان دهنده نسبت سرعت فعلی به سرعت ماکزیمم می باشد. اگر Vmax سرعت ماکزیمم باشد و V سرعت فعلی اتومبیل باشد مقدار DSpeed از رابطه زیر محاسبه می شود.
DSpeed= V/ Vmax
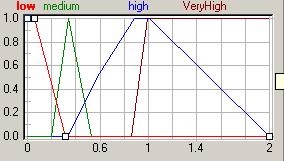
توابع عضويت براي DSpeed
متغيير خروجي”ACC” و متغییر ورودی IN_ACC :
اين متغيير خروجي ميزان شتاب ماشين را نشان مي دهد اگر شتاب مثبت باشد به سرعت ماشين افزوده مي شود و اگر شتاب منفي باشد از سرعت ماشين كاسته مي شود.
محدوده تغييرات شتاب از -10 تا +6 مي باشد. يك ماشين ساكن با شتاب +6 بعد از 4. 6 ثانيه سرعتش به 100 كيلومتر بر ساعت مي رسد. همچنين يك ماشين با سرعت 100 كيلومتر بر ساعت
با شتاب -10 مي تواند بعد از 2. 6 ثانيه توقف نمايد.
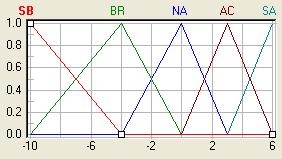
توابع عضويت براي ACC
متغيير خروجي”DS” :
اين متغيير نشان دهنده ميزان تغييرات زاويه فرمان ماشين در ثانيه مي باشد. و براي توليد زاويه فرمان استفاده مي شود.
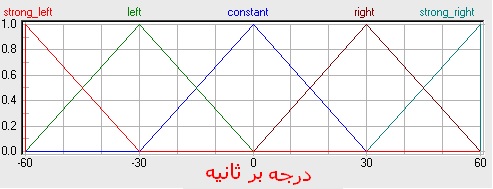
توابع عضويت براي DS
پایگاه های قوانین :
پایگاه های قوانین دربر گیرنده استراتژیهای کنترل فازی میباشد. هر قانون در پایگاه قانون شامل همه قوانین مرتبط با هم در مورد موضوع خاصی می باشد. بخش if توصیف کننده یک وضعیت میباشد
و بخش then نشان دهنده واکنش سیستم فازی در قبال وضعیت مورد نظر میباشد. پردازش قوانین با محاسبه بخش if آغاز میشود. نوع عملگر مربوط به پایگاه قانون تعیین کننده روشی است
که باید استفاده شود. در ادامه پایگاه قوانین مربوط به شتاب ماشین، بهینه سازی منحنی فرمان ماشین و ردیابی مسیر و در پایان قوانین جلوگیری از برخورد دو ماشین تعریف و ارائه شده است.
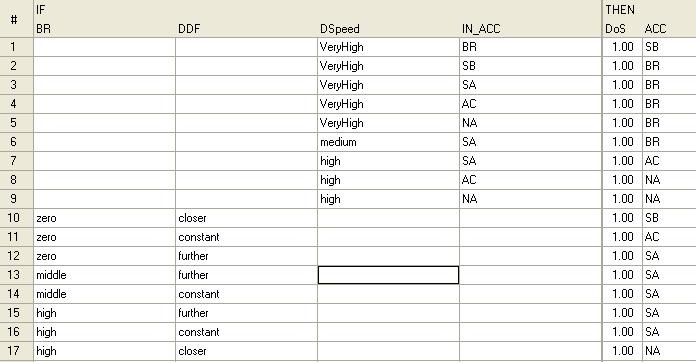
پايگاه قوانين مربوط به شتاب ماشين”ACC” :
اين پايگاه قوانين سرعت حركت ماشين را كنترل مي كند. و اين تظمين وجود دارد كه ماشين تا رسيدن به مانع بعدي خواهد ايستاد. مانع ممكن است پيچ جاده باشد.
در جدول زیر قوانین استفاده شده در این پایگاه قوانین نشان داده شده است.
پايگاه قوانين “Curve_Optimize” :
اين پايگاه قانون براي بهينه سازي منحني حرکت ماشین در سر پیچ ها استفاده می شود.
پايگاه قوانين رديابي مسير “Lane_Steering” :
اين پايگاه قانون براي مستقيم كردن مسير ماشين در جاده مي باشد. و فرض مي شود كه ماشين به موازات مسير جاده حركت كند. ولي حتما در وسط جاده نيست.
وقتي كه ماشين خيلي به لبه جاده نزديك شد كنترل كننده فازي فرمان ماشين را تغيير مي دهد تا ماشين از لبه جاده عبور نكند.
دیدگاهتان را بنویسید