
کنترل محدوده سرعت حرکت اتومبیل در جاده با استفاده از منطق فازی(قسمت اول)
کنترل محدوده سرعت حرکت اتومبیل در جاده با استفاده از منطق فازی(قسمت اول)
مسئله اصلی در این مقاله کنترل محدوده سرعت حرکت ماشین در جاده بدون انحراف آن از لبه جاده با استفاده از منطق فازی است. با پیشنهاد بکارگیری دو کنترل کننده فازی اصلی این هدف محقق
می شود. اولی زاویه فرمان چرخها را نسبت به اشتباهات مکانی و جهتی ماشین کنترل می کند. درحالیکه دومین کنترلگر نیروی شتاب و ترمز ماشین را از روی زاویه فرمان چرخ و سرعت ماشین تنظیم
می کند.
با استفاده از این کنترل کننده ها و بکارگیری یک دستگاه مختصات مناسب، معادلات کوپل شده مکان و سرعت ماشین شبیه سازی شده است.
1- مقدمه :
شبیه سازی رفتار ماشین بوسیله تغییر نیروی شتاب یا ترمز و زاویه فرمان چرخها که عملهای کنترلی را نشان میدهند نیازمند توجهات بیشتری به مدل دینامیکی دارد. بنابراین برای مطالعه رفتار ماشین با دقت بیشتر، ما باید تعداد درجات آزادی بیشتری را برای آن در نظر بگیریم (مدل پیچیده ). عموما مدل دینامیکی یک ماشین شامل چندین ورودی و خروجی می باشد.
چنین مدلهای دینامیکی پیشرفت داده شده و بوسیله سازنده های ماشین به جهت شبیه سازی رفتار ماشین و بالا بردن ضریب امنیت و کیفیت ماشین ها بکار برده می شود.
معمولا خودروها برای انتقالی خوب و راحت بکار برده می شوند ولی افزایش سرعت ماشین به صورت غیرعادی می تواند در جاده ها خطرات جانی و مالی جبران نا پذیری را بوجود آورد.
در چنین موقعیتهایی خودروهایی با کنترل محدوده سرعت سودمند به نظر می رسد.
FuzzyTECH یک نرم فزار برای معرفی سیستمهای فازی می باشد، در این نرم افزار امکانات مورد نیاز برای معرفی سیستم فازی از قبیل ورودیها، پایگاه قوانین و خروجیهای سیستم فازی وجود دارد.
در این مقاله ما اولا برای حرکت شتابدار ماشین در جاده و جلوگیری از انحراف آن از لبه های چپ و راست جاده، کنترل کننده هایی را روی ماشین جهت کنترل نیروی شتاب یا ترمز و زاویه فرمان چرخها
پیشنهاد داده ایم. برای حل این مسئله، ما مبانی کنترل فازی را بکار برده ایم.
2- مدل دینامیکی ماشین :
مسئله طوری طراحی شده است که ماشین در طول مسیر مارپیچ مانند جاده فرضی با مختصات مکانی در هر لحظه حرکت میکند و در طول مسیر با توجهبه نوع مسیر و نزدیک شدن به پیچ ها و یا دور
شدن از آن سرعتش را کم یا زیاد میکند. چون این ماشین می بایست در طول مسیر با دیواره های مرزی راه برخورد نداشته باشد.
بر روی آن سنسورهایی تعبیه شده است که نمای کلی این ماشین و سنسورهای آن را در شکل 1 نشان داده ایم. دراین شکل phi زاویه میان راستای ماشین و محور افقی x بر حسب رادیان می باشد.
همچنین X,Y مختصات محور وسط و عقب ماشين، L فاصله بين چرخ عقب و چرخ جلوي ماشين برحسب متر، W عرض ماشين، Theta زاويه چرخ جلوي ماشين نسبت به راستاي ماشين،
بر حسب راديان، V سرعت ماشين برحسب متر بر ثانيه،a شتاب ماشين بر حسب متر بر مجذور ثانيه، دامنه تغييرات زاويه theta بين -40 تا +40 مي باشد. و همچنين شتاب a از 10- تا +6 مي باشد.
اگر شتاب منفي باشد از سرعت ماشين كاسته مي شود. بنابراين اتومبيل با سرعت اوليه صفر بعد از 4. 6 ثانيه سرعتش به 100 كيلومتر در ساعت مي رسد، و همچنين با سرعت اوليه 100 كيلومتر بر
ساعت بعد از 2. 8 ثانيه مي تواند متوقف شود.

شکل 1
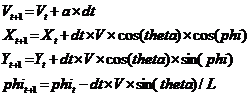
برای شبیه سازی حرکت ماشین، معادلات کوپل شده سرعت و مکان زیر بکار برده می شود :
3- طراحی کنترل کننده های ماشین فازی در FuzzyTECH :
طراحی سیستم فازی شامل مراحلی می باشد از جمله تعریف متغیرهای زبانی که الفبای سیستم است، تعیین انواع توابع عضویت که گردش اطلاعات سیستم را نشان میدهد، ایجاد پایگاه قوانین که قلب. سیستم فاز می باشد و در نهایت مرحله انتخاب روش غیرفازی سازی برای سیستم باید انجام شود.
ساختار سیستم :
ساختار سیستم در نظریه استنتاج فازی از طرف متغیرهای ورودی به متغیرهای خروجی می باشد. فرایند فازی سازی روی متغیرهای ورودی بدست آمده عمل کرده و آنها را به مقادیر فازی تبدیل میکند.
و سپس موتور استنتاج فازی بر اساس قوانین موجود در پایگاه قوانین مقدار فازی متغیرهای خروجی را محاسبه میکند. عملیات غیرفازی سازی متغیرهای خروجی را به صورت مقدار عددی تبدیل میکند.
در شکل 2 ساختار کلی سیستم فازی طراحی شده که شامل متغیرهای ورودی، پایگاه قوانین و متغیرهای خروجی میباشد ارائه شده است.
– متغیرها :
در این قسمت کلیه متغیرهای ورودی و خروجی و توابع عضویت مربوط به هر یک از آنها را به صورت جامع تعریف نموده ایم.
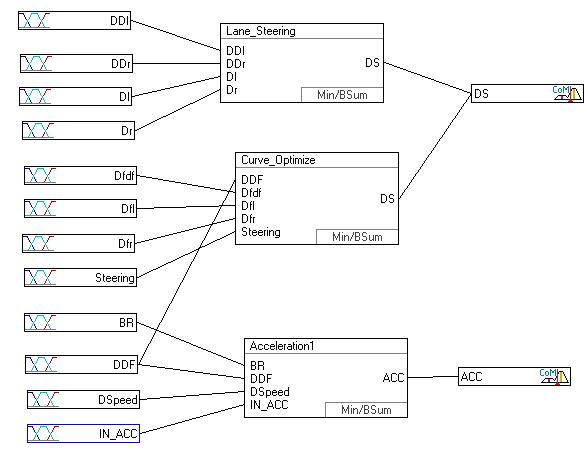
شکل2. ساختار کلی سیستم ماشین فازی
متغيير ورودي “BR” :
مقدار اين متغيير از طريق مقدار فاصله از راست و مقدار فاصله از چپ و كوتاهترين فاصله ماشين براي توقف محاسبه مي شود. اگر مقدار بدست آمده كوچكتر از صفر بود بايد حداكثر ترمز زده شود
اگر بزرگتر از صفر است شتاب بيشتري به ماشين داده مي شود.
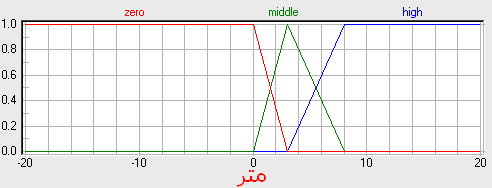
توابع عضويت براي BR
متغيير ورودي “DDF” :
اين متغيير سرعت رسيدن به پيچ را مشخص مي كند. براي محاسبه اين متغيير ميانگين فاصله ماشين از روبرو استفاده مي كنيم. اگر اين مقدار كاهشي بوديعني ماشين در حال نزديك شدن
به پيچ مي باشدو بايد ترمز كنيم و زاويه فرمان را بيشتر كنيم و اگر اين مقدار در حال افزايش است يعني ماشين در حال خارج شدن از پيچ است و مي توانيم به ماشين شتاب دهيم
و زاويه فرمان را كم كنيم.
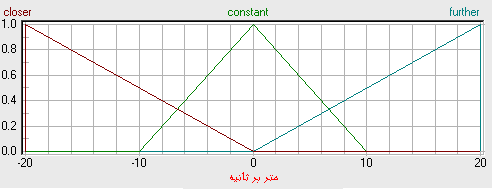
توابع عضويت براي DDF
پایان قسمت اول
مطالب زیر را حتما مطالعه کنید
منحنی AUC-ROC در یادگیری ماشین
درک منحنی AUC – ROC
چرحه حیات یادگیری ماشین

ذخیره و بارگذاری مدل در پایتون
رایانش تکاملی (الگوریتم ژنتیک ) و موارد استفاده آن در یادگیری ماشینی
1 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.